

موتور الکتریکی یک ماشین الکتریکی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. بیشتر موتورهای الکتریکی از طریق برهم کنش بین میدان مغناطیسی موتور و جریان الکتریکی در سیم پیچ کار می کنند تا نیرو را به شکل گشتاور اعمال شده بر شافت موتور تولید کنند. انرژی موتورهای الکتریکی را می توان از طریق منابع جریان مستقیم (DC) ، مانند باتری ها ، وسایل نقلیه موتوری یا یکسوسازها ، یا از طریق منابع جریان متناوب (AC) مانند شبکه برق ، اینورترها یا ژنراتور های الکتریکی تأمین کرد. یک ژنراتور الکتریکی ا با موتور الکتریکی یکسان است ، اما با جریان معکوس قدرت کار می کند و انرژی مکانیکی را به انرژی الکتریکی تبدیل می کند.
طبقه بندی موتور های الکتریکی
موتورهای الکتریکی را می توان با توجه به ملاحظاتی مانند نوع منبع تغذیه ، ساخت داخلی ، کاربرد و نوع حرکت خروجی طبقه بندی کرد. علاوه بر انواع متناوب در مقابل DC ، موتورها ممکن است با برس یا بدون برس باشند ، ممکن است از فازهای مختلف باشند (یک فاز ، دو فاز یا سه فاز) و ممکن است هوا خنک یا مایع خنک باشد. موتورهای منظوره عمومی با ابعاد و مشخصات استاندارد ، قدرت مکانیکی مناسبی را برای استفاده های صنعتی فراهم می کنند. بزرگترین موتورهای الکتریکی برای پیشرانه کشتی ، فشرده سازی خطوط لوله و برنامه های ذخیره سازی پمپ با درجه بندی 100 مگاوات استفاده می شود. موتورهای الکتریکی در فن های صنعتی ، دمنده ها و پمپ ها ، ماشین آلات ، لوازم خانگی ، ابزارهای برقی و درایو های دیسک یافت می شوند. موتورهای کوچک را می توان در ساعت های الکتریکی یافت.
الکتروموتور ها چگونه کار میکنند؟
موتورهای الکتریکی نیروی خطی یا چرخشی (گشتاور) را ایجاد می کنند که برای حرکت برخی از مکانیسم های خارجی مانند فن یا آسانسور طراحی شده است. یک موتور الکتریکی به طور کلی برای چرخش مداوم ، یا برای حرکت خطی در یک فاصله قابل توجه نسبت به اندازه آن طراحی شده است. سلونوئیدهای مغناطیسی نیروی مکانیکی قابل توجهی تولید می کنند ، اما در یک فاصله عملیاتی قابل مقایسه با اندازه آنها. مبدل هایی مانند بلندگوها و میکروفون ها بین جریان الکتریکی و نیروی مکانیکی تبدیل می شوند تا سیگنال هایی مانند گفتار را تولید کنند.
موتورهای الکتریکی با موتورهای احتراق داخلی (ICE) مقایسه می شوند ، از نظر جسمی کوچکتر هستند ، قدرت بیشتری را ارائه می دهند ، از نظر مکانیکی ساده تر و ارزان تر هستند ، در حالی که گشتاور فوری و ثابت را در هر سرعت ارائه می دهند ، با پاسخگویی بیشتر ، بهره وری کلی بالاتر و تولید گرمای کمتر. با این وجود موتورهای الکتریکی به اندازه ICE در برنامه های تلفن همراه (به عنوان مثال اتومبیل و اتوبوس) راحت و معمول نیستند زیرا به یک باتری بزرگ و گران قیمت احتیاج دارند ، در حالی که ICE ها به مخزن سوخت نسبتاً کوچکی نیاز دارند.




اولین موتورهای الکتریکی
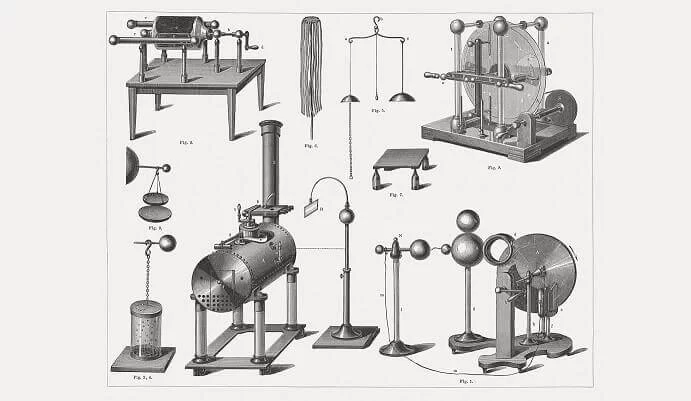
دستگاههای الکترواستاتیک ساده ای بودند که در آزمایشات توسط راهب اسکاتلندی اندرو گوردون و آزمایشگر آمریکایی بنجامین فرانکلین در دهه 1740 ساخته شدند. قانون کولنب ، توسط هنری کاوندیش در سال 1771 کشف و منتشر نشده است. این قانون به طور مستقل توسط چارلز-آگوستین دو کولومب در سال 1785 کشف شد ، وی آن را منتشر کرد به طوری که اکنون با نام او شناخته می شود. اختراع باتری الکتروشیمیایی توسط الساندرو ولتا در سال 1799تولید جریانهای الکتریکی پایدار را ممکن کرد. پس از کشف فعل و انفعال بین چنین جریانی و یک میدان مغناطیسی ، یعنی برهم کنش الکترومغناطیسی توسط هانس کریستین اورستد در سال 1820 خیلی زود پیشرفت زیادی حاصل شد.
قانون نیروی آمپر
فقط چند هفته طول کشید تا آندره ماری آمپر اولین فرمول فعل و انفعالات الکترومغناطیسی را ایجاد کرد و قانون نیروی آمپر را ارائه داد ، که تولید نیروی مکانیکی را با تعامل جریان الکتریکی و میدان مغناطیسی توصیف می کند. اولین نمایش اثر با یک حرکت چرخشی توسط مایکل فارادی در سال 1821 انجام شد. یک سیم آویز آزاد در استخر جیوه فرو رفت ، که آهنربای دائمی (PM) بر روی آن قرار گرفت. وقتی جریانی از سیم عبور می کرد ، سیم به دور آهنربا می چرخید و نشان می داد که جریان باعث ایجاد یک میدان مغناطیسی دایره ای نزدیک به دور سیم می شود. این موتور اغلب در آزمایش های فیزیک نشان داده می شود و جایگزین نمک با جیوه می شود. که باعث شد قدم های زیادی در ساخت الکترومور برداشته شود.
دیگر اختراعات شکل گرفته در پیشرفت الکتروموتور
یک Electric motor توسط جیمز ژول در سال 1842 ، موزه شکارچیان ، گلاسگو به کلوین ارائه شد. در سال 1827 ، فیزیکدان مجارستانی Ányos Jedlik آزمایش کویل های الکترومغناطیسی را آغاز کرد. بعد از اینکه جدلیک با اختراع کموتاتور مشکلات فنی چرخش مداوم را حل کرد ، دستگاه های اولیه خود را “خود روتور الکترومغناطیسی” نامید. اگرچه از آنها فقط برای آموزش استفاده می شد ، در سال 1828 Jedlik اولین دستگاهی را نشان داد که شامل سه جز اصلی موتورهای عملی DC استاتور ، روتور و کموتاتور است. این دستگاه از آهن ربا دائمی استفاده نمی کند ، زیرا میدان های مغناطیسی هر دو اجزای ثابت و گردان فقط توسط جریاناتی که از طریق سیم پیچ های آنها جریان دارند تولید می شوند.
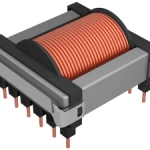
لازم به ذکر است که آهنربای الکتریکی نوعی آهنربا است که در آن میدان مغناطیسی توسط جریان الکتریکی تولید می شود. الکترومغناطیس ها معمولاً از سیم پیچیده شده در یک سیم پیچی تشکیل شده اند. جریانی که از سیم عبور می کند، میدان مغناطیسی ایجاد می کند که در سوراخ مرکز سیم پیچی متمرکز می شود.
اولین الکتروموتور DC
اولین موتور الکتریکی کموتاتور DC که توانایی چرخش ماشین آلات را داشت، توسط ویلیام استورجن ، دانشمند انگلیسی در سال 1832 اختراع شد. به دنبال کار استورجون ، یک موتور الکتریکی با جریان مستقیم از نوع کموتاتور توسط مخترع آمریکایی توماس داونپورت ساخته شد که در سال 1837 آن را به ثبت رساند. این موتورها با سرعت 600 دور در دقیقه کار می کردند و از ابزارهای ماشین آلات و یک ماشین چاپ استفاده می کردند. به دلیل هزینه بالای باتری اولیه ، موتورها از نظر تجاری ناموفق بودند و Davenport را ورشکست کردند. چندین مخترع تولید موتورهای DC دنبال کردند ، اما همه با همان مشکلات هزینه باتری روبرو شدند. از آنجا که در آن زمان هیچ سیستم توزیع برق در دسترس نبود ، هیچ بازار تجاری عملی برای این موتورها پدید نیامد.
اولین موتور الکتریکی چرخشی

آرماتور حلقه
یک نقطه عطف مهم در سال 1864 رخ داد ، زمانی که آنتونیو پاچینوتی برای اولین بار آرماتور حلقه را توصیف کرد (اگرچه در ابتدا یک ژنراتور DC ، یعنی یک دینام تصور می شد). این سیم پیچ های متقارن گروه بندی شده بر روی خود بسته شده و به میله های یک کموتاتور متصل می شوند ، برس هایی که جریان تقریباً نوسانی را تحویل نمی دهند. [ اولین موتورهای تجاری تجاری موفق تحولات را توسط Zénobe Gramme دنبال كرد كه در سال 1871 ، طرح Pacinotti را مجدداً ابداع كرد و برخی از راه حلها را توسط ورنر زیمنس اتخاذ كرد.
برگشت پذیری ماشین الکتریکی
یک مزیت برای ماشین های DC از طریق برگشت پذیری ماشین الکتریکی حاصل شد ، که توسط زیمنس در سال 1867 اعلام شد و توسط Pacinotti در 1869 مشاهده شد. گرام به طور تصادفی آن را به مناسبت نمایشگاه جهانی وین در سال 1873 نشان داد ، هنگامی که او دو دستگاه DC را تا فاصله 2 کیلومتری از یکدیگر وصل کرد و از یکی به عنوان مولد و دیگری به عنوان موتور استفاده کرد. روتور درام توسط فردریش فون هفنر-آلتنك از زیمنس و هالسكه برای جایگزینی آرماتور حلقه ای پاچینوتی در سال 1872 معرفی شد و بدین ترتیب بازده دستگاه بهبود یافت. روتور لمینت در سال بعد توسط زیمنس و هالسکه معرفی شد و باعث کاهش تلفات آهن و افزایش ولتاژهای القایی شد. در سال 1880 ، Jonas Wenström شکافهایی را برای قرار دادن سیم پیچ در اختیار روتور قرار داد که باعث افزایش بیشتر کارایی شد.
اولین سیستم چرخ دستی الکتریکی
در سال 1886 ، فرانک جولیان اسپراگ اولین موتور عملی DC را اختراع کرد ، دستگاهی بدون جرقه که سرعت نسبتاً ثابت را تحت بارهای متغیر حفظ می کند. سایر اختراعات الکتریکی Sprague در این زمان توزیع برق شبکه را بسیار بهبود بخشیده است (کار قبلی که توسط توماس ادیسون انجام شده بود) ، اجازه داد که برق از موتورهای الکتریکی به شبکه الکتریکی برگردانده شود ، توزیع برق به چرخ دستی ها از طریق سیم های بالادست و قطب واگن برقی ، و سیستم های کنترلی را برای عملیات الکتریکی فراهم کرده است. این امر به Sprague اجازه داد تا از موتورهای الکتریکی برای اختراع اولین سیستم چرخ دستی الکتریکی در سالهای 1887-1888 در ریچموند ، ویرجینیا ، آسانسور برقی و سیستم کنترل در سال 1892 و مترو برقی با اتومبیل های کنترل مرکزی با قدرت مستقل استفاده کند.
ایجاد آسودگی در زندگی
موتورهای الکتریکی انقلابی در صنعت ایجاد کردند. فرآیندهای صنعتی دیگر با انتقال قدرت با استفاده از شفت های خط ، تسمه ها ، هوای فشرده یا فشار هیدرولیکی محدود نمی شدند. در عوض ، هر دستگاه می تواند به منبع تغذیه خود مجهز باشد ، کنترل آسان را در هنگام استفاده فراهم کند و بازده انتقال قدرت را بهبود بخشد. موتورهای الكتریكی كه در کشاورزی بکار می روند قدرت عضلات انسان و حیوان را از عهده کارهایی مانند دست زدن به غلات یا پمپاژ آب خارج می كنند. استفاده های خانگی (مانند ماشین لباسشویی ، ماشین ظرفشویی ، پنکه ، تهویه هوا و یخچال (جایگزین جعبه های یخ)) از موتورهای الکتریکی باعث کاهش نیروی کار زیاد در خانه شده و استانداردهای بالاتر راحتی ، آسایش و ایمنی را امکان پذیر می کند. امروزه موتورهای الکتریکی مصرف بیشتری دارند.
اولین موتور القایی بدوی
در سال 1824 ، فرانسوا آراگو ، فیزیکدان فرانسوی وجود میدانهای مغناطیسی چرخان را فرموله کرد و چرخشهای آراگو را اصطلاح کرد که والتر بیلی با روشن و خاموش کردن دستی کلیدها ، در سال 1879 اولین موتور القايي بدوی را نشان داد. در دهه 1880 بسیاری از مخترعین در تلاش بودند موتورهای متناوب AC را تولید کنند. زیرا مزایای AC در انتقال ولتاژ بالا از راه دور با عدم توانایی کارکرد موتور در AC جبران می شد.
اولین موتور القایی بدون جابجایی جریان متناوب توسط Galileo Ferraris در سال 1885 اختراع شد. Ferraris توانست اولین طراحی خود را با تولید تنظیمات پیشرفته تر در سال 1886 بهبود بخشد. در سال 1888 ، آکادمی سلطنتی علوم تورین تحقیقات فراری را با جزئیات مبانی عملکرد موتور منتشر کرد ، در حالی که در آن زمان نتیجه گرفت که “دستگاه مبتنی بر آن اصل نمی تواند از نظر تجاری از اهمیت تجاری برخوردار باشد”.
موتور القایی نیکولا تسلا
نیكولا تسلا ، كه به طور مستقل الکتروموتور القایی خود را در سال 1887 اختراع كرد و در مه 1888 ثبت اختراع كرد ، توسعه صنعتی احتمالی را تصور كرد. در همان سال ، تسلا مقاله خود را با عنوان “یك سیستم جدید برای موتورهای متناوب و ترانسفورماتورهای فعلی” به AIEE ارائه داد كه سه مورد ثبت شده دو موتور چهار فاز چهار استاتور، یکی با یک روتور چهار قطبی که یک موتور اهرمی غیر خود راه انداز تشکیل می دهد ، دیگری با یک روتور زخمی که یک موتور القايي خود راه اندازی می کند و سوم یک موتور همزمان با منبع جداگانه تغذیه DC به سیم پیچ روتور. با این حال ، یکی از حق ثبت اختراعات تسلا که در سال 1887 ثبت شد ، همچنین یک موتور القایی روتور با سیم پیچی کوتاه را توصیف می کند.
موتورهای اولیه وستینگهاوس
مشخص شد موتور القایی AC با سرعت ثابت برای اتومبیل های خیابانی مناسب نیست ،اما مهندسان وستینگهاوس با موفقیت آن را برای تامین نیرو در یک عملیات استخراج در تلوراید ، کلرادو در سال 1891. سازگار کردند. وستینگهاوس اولین موتور القایی عملی خود را در سال 1892 به دست آورد و در سال 1893 خطی از موتورهای القایی 60 هرتز پلی فاز را توسعه داد .
موتور های القایی جنرال الکتریک
شرکت جنرال الکتریک در سال 1891 شروع به تولید موتورهای القایی سه فاز کرد. تا سال 1896 ، جنرال الکتریک و وستینگهاوس توافقنامه مجوز متقابل را برای طراحی روتور میله پیچ امضا کردند که بعداً روتور قفس سنجابی نامیده شد. بهبود موتور القایی ناشی از این اختراعات و نوآوری ها به حدی بود که یک موتور القایی 100 اسب بخار در حال حاضر دارای ابعاد نصب یکسان با موتور 7.5 اسب بخاری در سال 1897 است
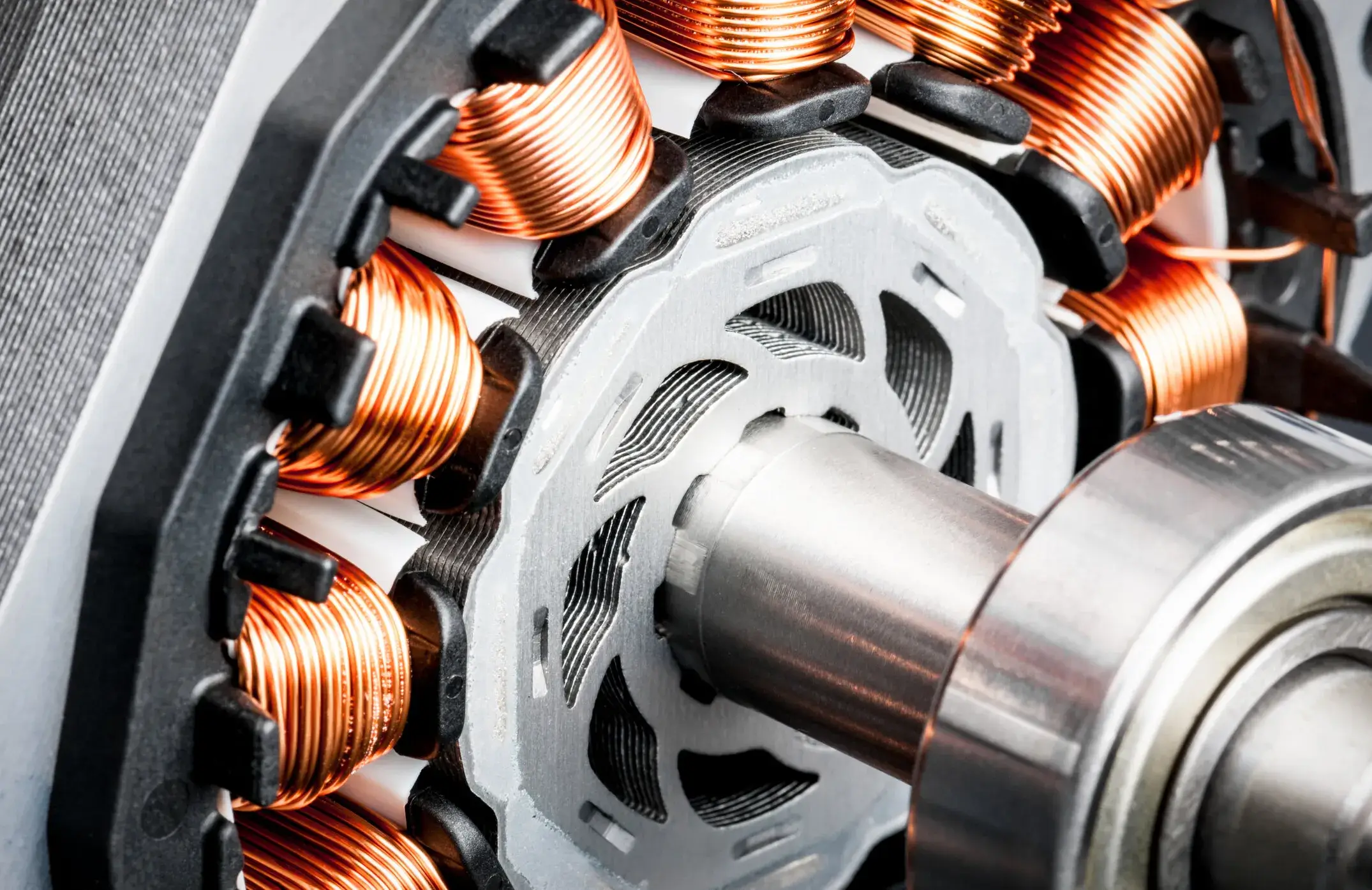
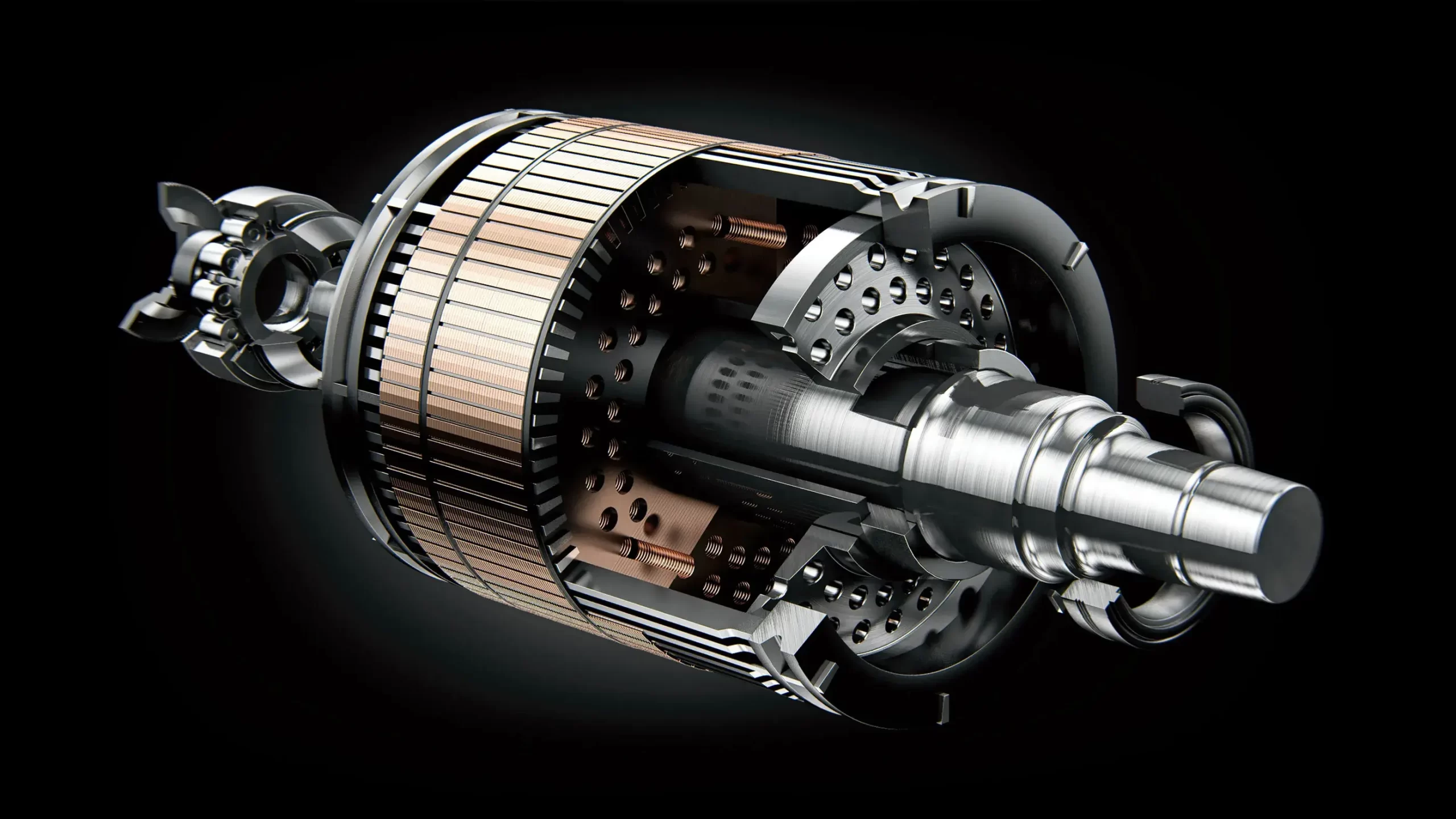
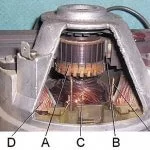
- روتور
- بلبرینگ
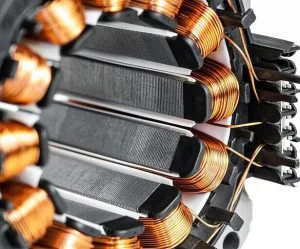
- استاتور
- شکاف هوا
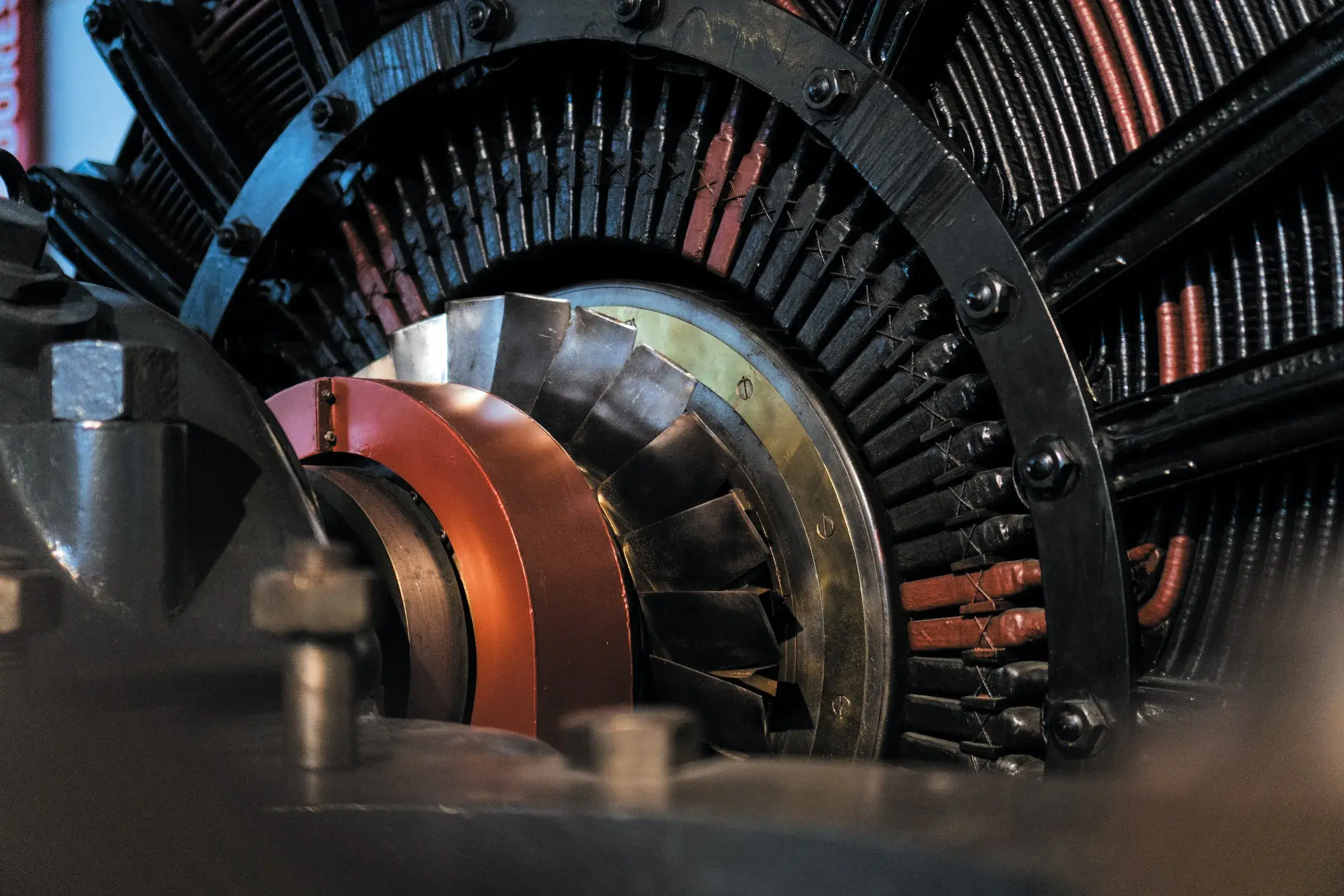
- سیم پیچ
- کموتاور
- پوسته
- فن
- منبع تغذیه
روتور

بلبرینگ

استاتور

شکاف هوا

سیم پیچ
پیکربندی های قطب برجسته و ناهمسان قطب ها
ماشین های الکتریکی در دو پیکربندی اصلی میدان آهنربا قرار دارند. در دستگاه قطب برجسته ، میدان مغناطیسی قطب توسط یک زخم سیم پیچ در اطراف قطب زیر سطح قطب تولید می شود. در ماشین بدون قطب یا میدان توزیع شده یا روتور گرد ، سیم پیچ در شکاف های صورت قطب توزیع می شود. یک موتور قطب سایه دار دور قسمتی از قطب پیچیده است که فاز میدان مغناطیسی آن قطب را به تاخیر می اندازد.
بعضی از موتورها رساناهایی دارند که از فلز ضخیم تری تشکیل شده است ، مانند میله ها یا ورق های فلز ، معمولاً مس ، و آلومینیوم. اینها معمولاً توسط القای الکترومغناطیسی تأمین می شوند.
کموتاتور
پوسته
همه اجزاء تشکیل دهنده موتور الکتریکی چه ثابت باشند چه متحرک درون پوسته ای قرار میگیرند که معمولا آلمینیومی است.
فن
وظیفه انتقال هوا از بیرون به داخل پوسه را دارد. با این کار موتور الکتریکی خنک میشود. این فن بر قسمت انتهایی الکتروموتور و شافت قراردا.
منبع تغذیه
همانطور که اشاره شد، الکتروموتورها با انرژی الکتریکی شروع به کار می کنند. این نوع منبع تغذیه ممکن است حاوی برق جریان مستقیم DC و یا برق جریان متناوب AC باشند. موتورهای الکتریکی کاربردهای گسترده ای در صنایع دارند و در زندگی روزمره در بسیاری از تجهیزات و وسایل از لوازم خانگی تا ماشین آلات سنگین از موتورهای الکتریکی بهره می برند.
یک پاسخ
متشکرم